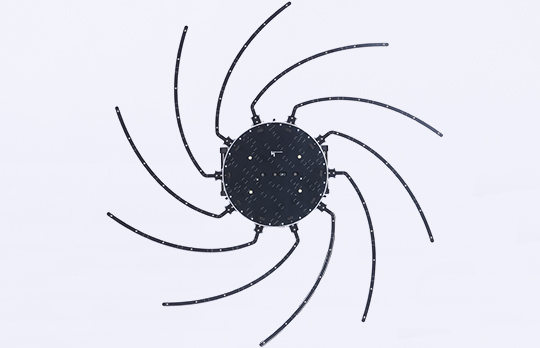
HEAD VISOR 声学照相机,使用波束成形技术进行声源定位的麦克风阵列

HEAD VISOR 声源定位系统包括软件和麦克风阵列。该系统使用波束成形技术实时检测声源位置。多种麦克风阵列可用于不同的应用场景,支持定制化阵列。HEAD VISOR...
HEAD VISOR 声源定位系统包括软件和麦克风阵列。该系统使用波束成形技术实时检测声源位置。多种麦克风阵列可用于不同的应用场景,支持定制化阵列。HEAD VISOR 软件支持所有硬件阵列。
麦克风阵列一启动,HEAD VISOR 软件就会提供同步更迭的高质量声源映射视频图像。让您可以毫无延迟地获取有关声源的必要信息-识别声源位置,声压级和频谱。
三个版本的麦克风阵列都结合了波束成形与 MultipleEye 多眼技术,使用三个摄像头实时记录视频图像。该过程能够以极高的精度确定被测对象到阵列的距离,并连续、同步显示视频图像。
HEAD VISOR 麦克风阵列有以下几种:
- HEAD VISOR VMA V:重量轻、便携式、手持、可扩展的麦克风阵列,带有集成显示屏和控制功能,可灵活应用,结果直接显示在设备上(阵列直径0.3m/1.0m)
HEAD VISOR 声源定位系统包括软件和麦克风阵列。该系统使用波束成形技术实时检测声源位置。多种麦克风阵列可用于不同的应用场景,支持定制化阵列。HEAD VISOR 软件支持所有硬件阵列。
麦克风阵列一启动,HEAD VISOR 软件就会提供同步更迭的高质量声源映射视频图像。让您可以毫无延迟地获取有关声源的必要信息-识别声源位置,声压级和频谱。
三个版本的麦克风阵列都结合了波束成形与 MultipleEye 多眼技术,使用三个摄像头实时记录视频图像。该过程能够以极高的精度确定被测对象到阵列的距离,并连续、同步显示视频图像。
HEAD VISOR...
HEAD VISOR 声源定位系统包括软件和麦克风阵列。该系统使用波束成形技术实时检测声源位置。多种麦克风阵列可用于不同的应用场景,支持定制化阵列。HEAD VISOR 软件支持所有硬件阵列。
麦克风阵列一启动,HEAD VISOR 软件就会提供同步更迭的高质量声源映射视频图像。让您可以毫无延迟地获取有关声源的必要信息-识别声源位置,声压级和频谱。
三个版本的麦克风阵列都结合了波束成形与 MultipleEye 多眼技术,使用三个摄像头实时记录视频图像。该过程能够以极高的精度确定被测对象到阵列的距离,并连续、同步显示视频图像。
HEAD VISOR 麦克风阵列有以下几种:
- HEAD VISOR VMA V:重量轻、便携式、手持、可扩展的麦克风阵列,带有集成显示屏和控制功能,可灵活应用,结果直接显示在设备上(阵列直径0.3m/1.0m)
